Placas para Arduino
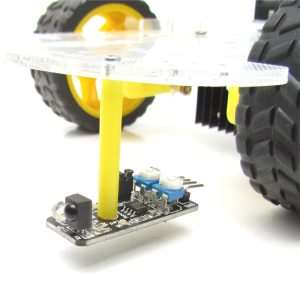
Sensor Ultra Sonico de Distância HC-SR04 Shield para Arduino
SKU: A068O Sensor Ultra Sonico de Distância HC-SR04 foi desenvolvido para aperfeiçoar projetos de robótica e microeletrônica, é ideal para calcular a distância com precisão de objetos, com operação entre ~2cm à ~400cm.
Disponibilidade:
Em estoque
R$15,90
Em estoque
O Sensor Ultra Sonico de Distância HC-SR04 foi desenvolvido para aperfeiçoar projetos de robótica e microeletrônica, é ideal para calcular a distância com precisão de objetos, com operação entre ~2cm à ~400cm.
Sensor Ultra Sonico De Distância Hc-sr04 Shield para Arduino
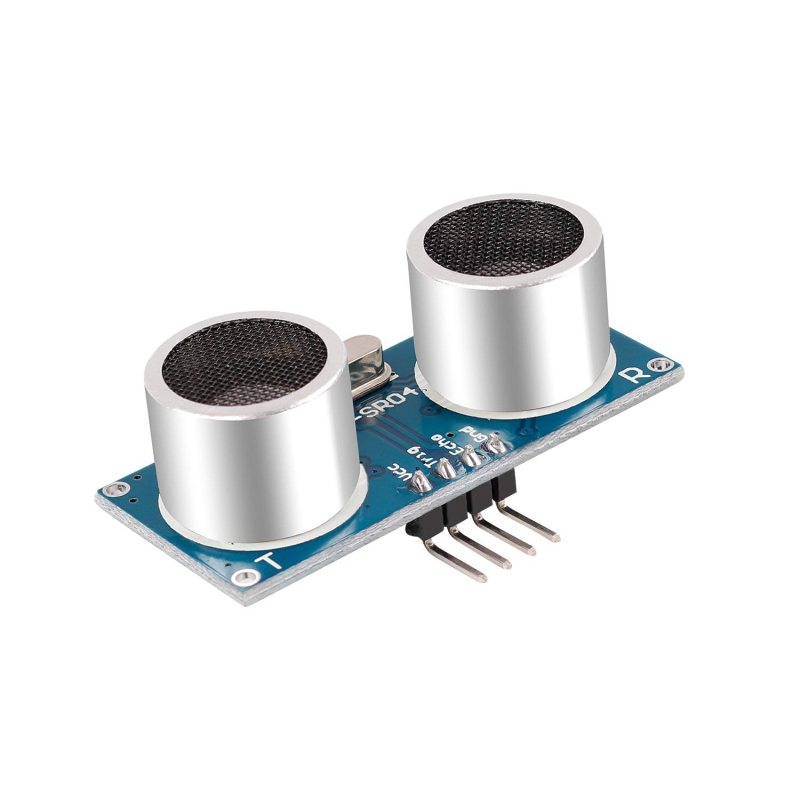
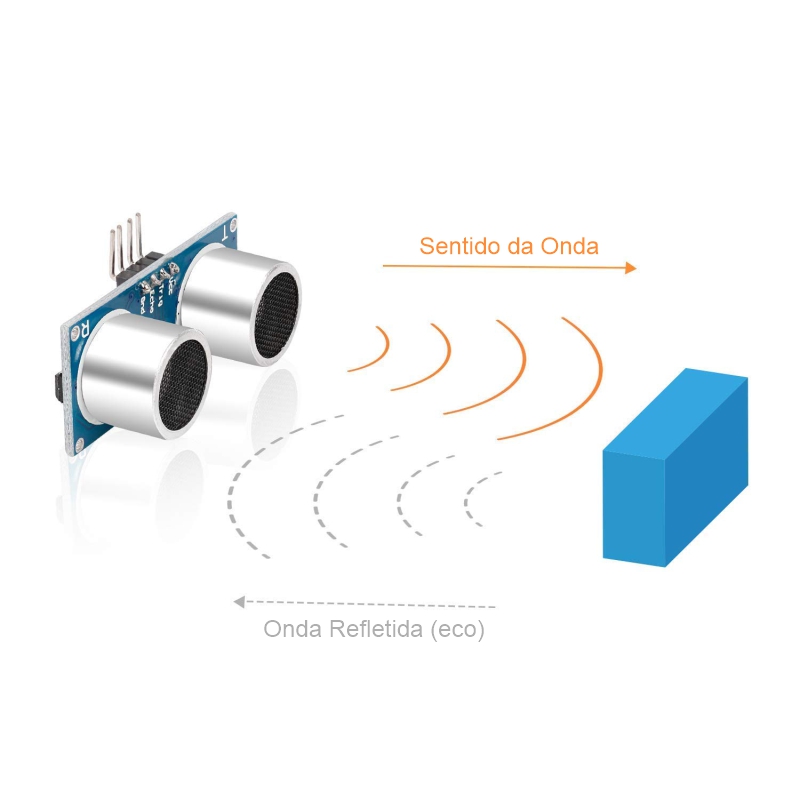
O HC-SR04 é um Sensor Ultra sônico de Distância composto por um emissor e um receptor, com capacidade de medir distâncias de ~2cm até ~4m, com uma precisão de aproximadamente 3mm. Este sensor emite sinais ultrassônicos que refletem no objeto a ser atingido e retornam ao sensor, precisando a distância do alvo, tomando o tempo de trânsito do sinal.
A velocidade do sinal ultrassônico emitida pelo Sensor Ultrassom HC-SR04 corresponde a velocidade do som, que é de aproximadamente 340 m/s, assim, se o sensor estiver a uma distância x do objeto, o sinal percorrerá uma distância equivalente a 2x, ou seja, a onda é enviada pelo sensor e rebatida no obstáculo, logo ela percorre 2 vezes a distância procurada.
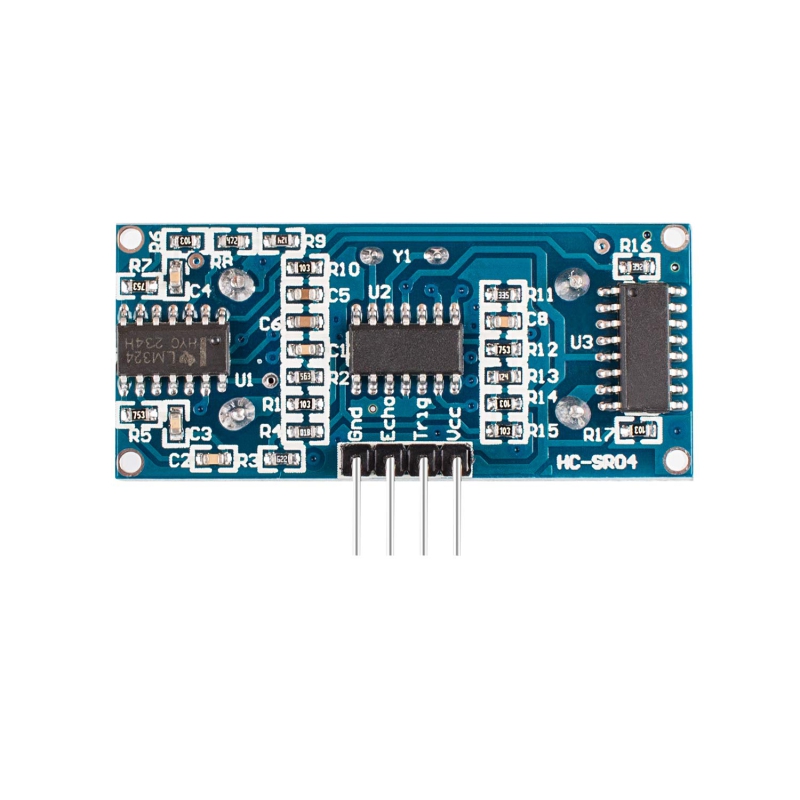
Ademais, o Sensor Ultrassônico de Distância HC-SR04 possui um circuito pronto com emissor e receptor acoplados e 4 pinos (VCC, Trigger, ECHO, GND) para medição, auferindo maiores possibilidades de utilização.
Características
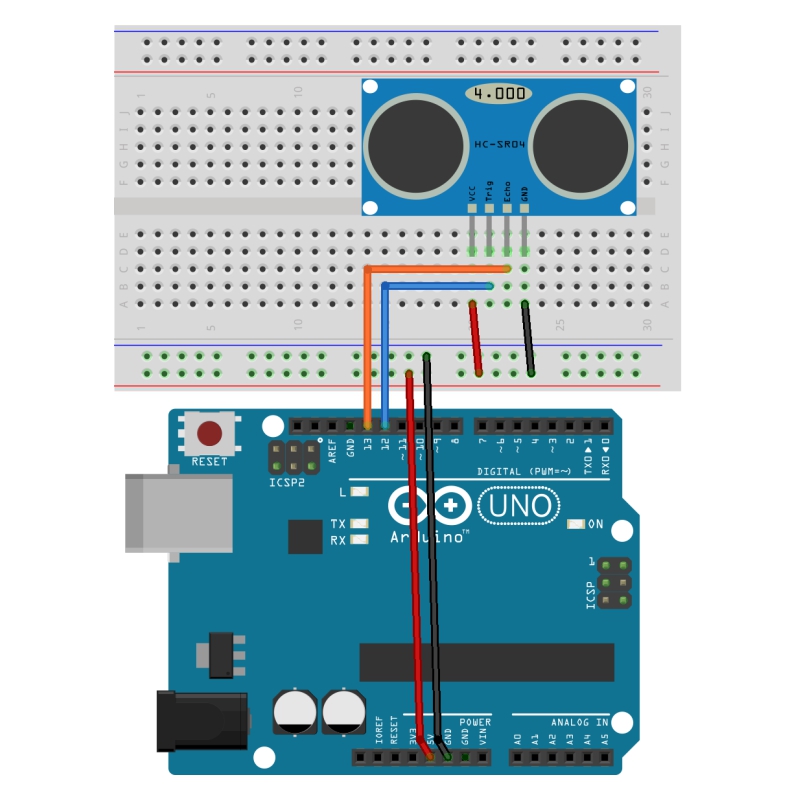
- Modos de conexão: VCC, trig (T), echo (R) e GND;
- Ideal para utilização em Arduino, PIC e outros microcontroladores;
- Alimentação: 5VDC;
- Corrente de Operação: 2mA;
- Ângulo do sensor não superior a 15 graus;
- Alcance: 2cm ~ 4m;
- Alta precisão: ~3mm;
- Sinal de entrada trigger: 10us impulso TTL;
- Sinal Echo: saída TTL PWL sinal;
- Dimensões totais (CxLxA): ~4,5x2x1,5cm;
- Peso: 9g. Sensor Ultra Sonico possui função de medição sem contato de 2cm à 400cm, com precisão de aproximadamente 3mm. O módulo é composto por transmissor, receptor e circuito de controle.
Acompanha
- 1 x Sensor Ultra Sonico
Princípio De Funcionamento
1 – Manter o IO trigger em nível lógico alto por no mínimo 10us,
2 – o módulo automatimente envia oito ciclos de uma freqüência de 40 kHz e detecta se há um pulso de retorno.
3 – Caso haja sinal de retorno, através de um sinal de nível alto, o tempo de duração deste sinal em nível alto representa a diferença de tempo entre o envio e o retorno.
|
Distancia = [(Duração do pulso de eco) x (340m/s)] |
Seu funcionamento consiste basicamente em enviar um sinal que, ao atingir um objeto, volta para o sensor e com base nesse tempo entre o envio e recebimento, é calculada a distância entre o sensor e o objeto.
Analisando com mais detalhes esse processo de medição, que ocorre em 3 etapas:
- É enviado um sinal com duração de 10 us (microsegundos) ao pino trigger, indicando que a medição terá início
- Automaticamente, o módulo envia 8 pulsos de 40 KHz e aguarda o retorno do sinal pelo receptor
- Caso haja um retorno de sinal (em nível HIGH), determinamos a distância entre o sensor e o obstáculo utilizando a seguinte equação: Distancia = (pulso em nível alto x velocidade do som (340m/s) /2

Pinagem
| VCC | Alimentação de +5V |
| Trig | Entrada de pulso |
| Echo | Saída de pulso |
| GND | Terminal terra |
Código Exemplo:
/************************************Autor: Leonardo Dalla Porta***************05/05/2014**************************Atenção*****************O Codigo esta livre para uso,***desde que seja mantida sua fonte* ********e seu autor.**********************Faça um bom uso*****************Att. Equipe UsinaInfo****************************************/ #include "Ultrasonic.h" //Adiciona a biblioteca do sensor Ultrassonico#include <LiquidCrystal.h> //Adiciona a biblioteca do display LiquidCrystal lcd(12, 11, 5, 4, 3, 2); //Define os pinos para o displayUltrasonic ultrasonic(10,9); // Define os pinos para o Sensor void setup() { lcd.begin(16, 2); //"avisa" o arduino que o LCD possui 16 linhas e 2 colunas} void loop(){ lcd.clear(); //Limpa o LCD lcd.setCursor(0, 0); //Posiciona uma linha no display lcd.print("Distancia"); //Escreve no diplay "Distancia" lcd.setCursor(4, 1); //Posiciona uma linha no display lcd.print(ultrasonic.Ranging(CM)); //Faz a leitura do sensor e apresenta no display lcd.print("cm"); //Escreve "CM" após o valor do sensor delay(400); //Aguarda 100ms para a proxima leitura}| Peso | 0,05 kg |
|---|---|
| Dimensões | 16 × 11 × 7 cm |
Política de Troca e Devolução
Você tem até 7 dias corridos após o recebimento para solicitar devolução por arrependimento conforme o CDC.
Para produtos com defeito, o prazo para troca é de 30 dias a partir do recebimento. O item deve estar com todos os acessórios e embalagem original.
Para abrir a solicitação, entre em contato pelos nossos canais informando o número do pedido e fotos do produto.